Newton's Cradle.
by Donald Simanek
The physics toy and physics demo sold as "Newton's cradle" is also called "colliding balls", "Newton's spheres", "counting balls", "impact balls", "ball-chain", the "executive pacifier", and even, believe it or not, "Newton's balls." Newton did not invent this apparatus or describe it. It may have originated with the Dutch mathematician and philosopher Willem Jacob 's Gravesande (1688–1742) who championed Newton's physics and made apparatus to demonstrate it's principles.
This document makes no claim to be a complete treatment of this device. The extensive literature references should be consulted by those who wish to delve deeper. We will attempt to shed a little light on things not often mentioned in elementary textbook treatments, and suggest some experiments one might do to test certain assumptions about the physics of elastic and inelastic collisions.
|
|
Animated image provided by Raven Black, and used here by permission of the artist. |
|---|
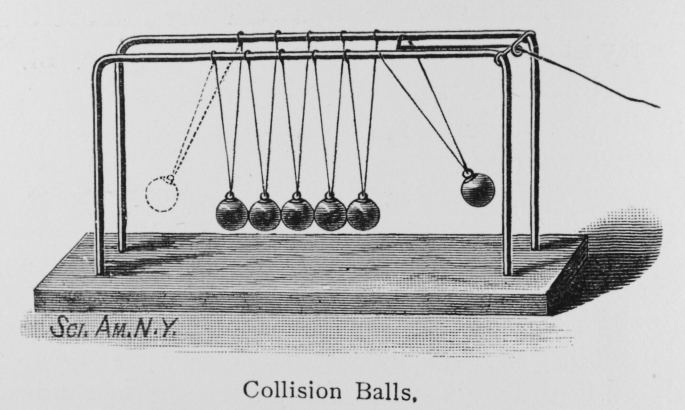
1. The apparatus.
The apparatus usually consists of an odd number (5 or 7 is common) of identical steel balls each suspended by a bifilar suspension from a sturdy frame. The balls are carefully aligned along a horizontal row, just touching each other.
If you don't have one of these and haven't seen one in action, please play a bit with this interactive flash animation demonstrating the idealized behavoir of this apparatus.
When the ball on one end is pulled aside and allowed to swing as a pendulum, it hits the next ball. The outcome is fascinating, for the one ball on the far end is knocked away from the others with nearly the same speed as the first ball had initially and all of the other balls remain nearly at rest. If you pull back two balls and let them strike the others, two balls are ejected from the other end, and all the other balls remain nearly at rest. However many you pull aside, the same number is ejected from the other end. Why does this happen? Why are these the only outcomes that occur? Why not others?
We shall refer to this as the 'standard behavior' and the standard observed outcome, for the purposes of discussion. We are quite aware that this is an idealized outcome, and that the real apparatus doesn't quite achieve it, though it comes quite close. We are also aware that deviations from the ideal conditions (differences in materials, spherical vs. cylindrical masses, some balls touching, some not) can cause very interesting deviations from expected behavior and are severe tests for any model of system behavior. Some of these are discussed in the references at the end of this document.
Why has this become a standard demonstration in physics courses? What important principle is it supposed to show? Usually it is "advertised" as a demonstration that momentum is conserved in elastic collisions. Well, the outcome certainly does illustrate that, but so does every other mechanical interaction you might care to consider, whether it be elastic or inelastic. This particular apparatus, cleverly designed to be nearly elastic, is a special case, and the full generality of conservation of momentum is not demonstrated by it. Some books say that this demo shows that both energy and momentum are conserved in a collision. That's closer to the mark. But still, this apparatus is a special case: collisions between identical spherical, nearly perfectly elastic, balls of equal mass, size and composition. Those special conditions are responsible for the intriguing and special behavior we observe.
|
This raises in the inquiring student mind all sorts of questions, such as "What if the balls were of different size, mass, shape or composition?" And that opens a whole can of worms that could lead one far astray and consume a lot of class time. It can easily lead into discussion of energy-dispersive systems and the importance of impedance matching. Seeing the demonstration raises a very sticky question: "How do the balls "know" that if you have N balls initially moving at the same speed, that exactly N balls should swing out from the other end?" This is the feature of this apparatus that justifies the name "counting balls", for the system seems to "remember the number" of balls that were pulled aside initially. This is the big question that the elementary accounts do not answer satisfactorily. Answering all of these questions would be fine for an upper-level university physics course, but are hardly suitable for a freshman or high school course.
Sometimes textbooks suggest a simpler version of the apparatus: marbles rolling on a grooved track. This presents even stickier problems, for the result depends on conservation of energy (linear and rotational), conservation of momentum and conservation of angular momentum. Still worse, friction, rolling resistance, slipping on the track and momentum exchange with the track during the collision all affect the outcome.
Do not expect to find all of the answers in this web document. Consult the journal references at the end of this document if you want to delve deeper. As a point of departure we begin by limiting our discussion to the classic apparatus: identical perfectly elastic spherical balls. Only later will we consider systems with various shapes, masses and materials.
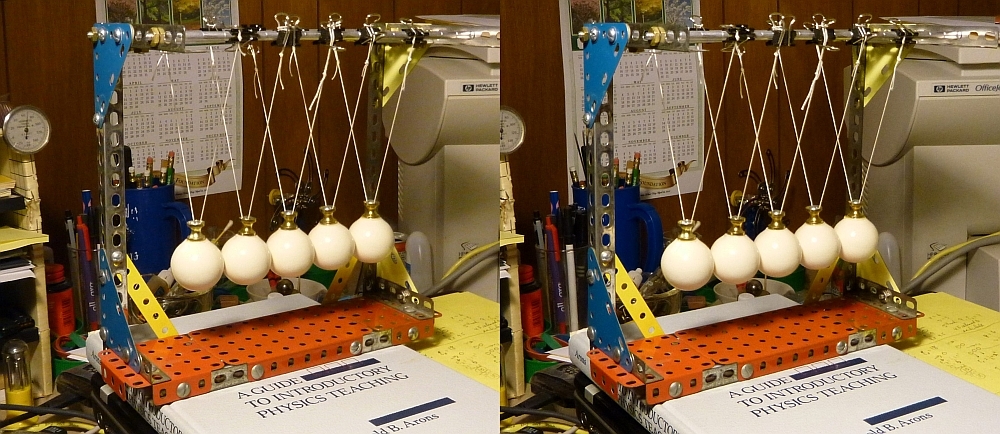 |
| Homebuilt Newton's cradle using ceramic cabinet knobs and Meccano/Erector parts. Stereo for cross-eyed viewing. |
|---|
2. Inadequate textbook treatments.
|
Textbooks and internet sites often tell lies about this demonstration. Here's a few of these lies, with my comments in square brackets:
- The observed outcome is the only one that conserves both energy and momentum. [Not so. There are others.]
- The balls aren't really touching, so a series of independent two-ball collisions occurs. [This is not a necessary assumption. Many commercial versions of this apparatus do have a slight gap between the balls. That improves the desired performance somewhat, but the surprising outcome is essentially the same whether or not they are touching.] And that raises the question "Why does the successive collisions model predict the right answers even when the conditions for it are not met?
- The observed outcome is due to the finite speed of sound (an elastic compressional wave traveling down the line of balls). [This is also not a necessary assumption, for the standard outcome would be seen even if the speed of sound were infinite! However if the speed of sound were very slow relative to the ball velocities, we might have different outcomes.]
- To understand this demo requires wave equations and solution of 2N simultaneous equations [This may not be necessary. The materials of freshman physics may be sufficient to answer some of the obvious questions. Such an analysis could reveal some very basic and important physics at that level. The more general and mathematical analysis may obscure some interesting conceptual details.]
Some fake explanations try to convince the reader by citing a particular example:
V -> balls at rest
before: O OO
V ->
after: OO O
at rest
Consider three balls. Balls 2 and 3 are stationary. Ball 1 hits ball 2 with speed V. Ball 3 moves away with speed V leaving balls 1 and 2 stationary. [Yes, that's what happens in the real world.] Momentum and energy are both conserved.Why are other results impossible? Consider the hypothetical outcome: Ball 2 and 3 move off with speed V/2, leaving ball 1 stationary. Answer: This conserves momentum, but not kinetic energy.
The math is easily checked, and every statement is true. But this is not the end of the story by any means, nor is it a proof, nor does it give any insight into the problem. You do not prove the impossibility of all other outcomes by showing that one other outcome is impossible. That's an elementary fallacy of logic.
Are there other outcomes that satisfy conservation of energy and momentum, yet are not observed to happen? Yes, and they are easily found. For simplicity, take all masses to be 1. Ball 1 has initial speed V, balls 2 and 3 are initially at rest, touching each other.
V=6
----->
Before: o oo Ball 1 moving at speed 6,
1 23 balls 2 and 3 are initially at rest.
Contact: ooo -> All three moving with speed 2
After: oo o -----> Balls 1 and 2 at rest. Ball 2 has speed 6.
This is the observed outcome, which we will call "case 1", summarized below. But why does case 2 not occur?
| Quantity | Initial 1 |
Initial 2 |
Initial 3 |
Final 1 |
Final 2 |
Final 3 |
|---|---|---|---|---|---|---|
| velocity | 6 | 0 | 0 | 0 | 0 | 6 |
| momentum | 6 | 0 | 0 | 0 | 0 | 6 |
| kinetic energy | 18 | 0 | 0 | 0 | 0 | 18 |
| Quantity | Initial 1 |
Initial 2 |
Initial 3 |
Final 1 |
Final 2 |
Final 3 |
Net |
|---|---|---|---|---|---|---|---|
| velocity | 6 | 0 | 0 | -2 | 4 | 4 | |
| momentum | 6 | 0 | 0 | -2 | 4 | 4 | 6 |
| kinetic energy | 18 | 0 | 0 | 2 | 8 | 8 | 18 |
Case 2 clearly satisfies conservation of energy and momentum. Yet it is not observed to happen. Suspicion focuses on the processes happening during the impact, when the three balls were in contact for a brief time interval. What's going on there? The balls deform elastically near the point of impact.
Can you find any other hypothetical situations that would conserve energy and momentum but do not happen?
If we can answer this question for the three-ball case we might gain insight into the N-ball general case. In fact, if we look carefully at the two-ball case we might learn something about how the elastic properties of the balls store and release energy.
Some textbooks and web sites tell you nothing other than a description of the behavior of the system and note that this behavior satisfies the conservation of energy and momentum. Perhaps they are "playing it safe" by not attempting to answer the obvious questions that "inquiring minds want to know."
So, with these trivial distractions out of the way, what is the explanation? Why is just one (of many) momentum and energy conserving outcomes selected by the laws of physics, to be the only outcome that happens?
Answer: Another outcome that would conserve energy and momentum, but does not occur, is this: All balls have mass =1. Ball 1 has initial speed vo, balls 2 and 3 are in contact at rest. The final velocities are:
v1 = vo/6
v2 = [7 − √(21)]vo/12
v3 = [7 + √(21)]vo/12
Here's the results in tabular form for three balls of mass 1.
| Quantity | Initial 1 |
Initial 2 |
Initial 3 |
Final 1 |
Final 2 |
Final 3 |
Net |
|---|---|---|---|---|---|---|---|
| velocity | 6 | 0 | 0 | +1 | [7 −√(21)]/2 = − 4.71 | [7 +√(21)]/2 = 9.29 | |
| momentum | 6 | 0 | 0 | +1 | [7 −√(21)]/2 = − 4.71 | [7 +√(21)]/2 = 9.29 | 6 |
| kinetic energy | 18 | 0 | 0 | 0.5 | 11.1 | 43.15 | 54.25 |
Modeling Newton's Cradle
1. The successive impacts model. The simplest model to understand is one that invokes a "cheat". It assumes the N balls are initially not touching. The first ball is pulled back and strikes the second with speed. The first ball comes to rest and the second moves forward with speed V, hits the third ball, and so on down the line, till the last ball is ejected with speed V.This is valid when the balls are actually separated. But then some folks assume that the explanation is also valid when the balls are touching. Well, the results are nearly the same in both cases, but the dynamics of the processes are certainly different. We will move on to look at the interesting case, where all balls are initially touching each other.
2. The compression pulse model. This assumes that the balls are initially all touching. A compression pulse begins in the metal balls at the point of first impact, traveling through the balls with the speed of sound. The speed of sound in the material of which the balls are made is much greater than the speeds of the balls. So the pulse "does its work" before any of the stationary balls have moved. The pulse travels forward and backward, reflecting from the ends of the string of balls and meeting again simultaneously at one point. Where is that point? Well, if the pulse originated between the first two balls, the pulse meets between the last two balls, where it gives up its momentum and energy, giving the last ball a kick, and slowing the others to a stop before they have moved much.
This sounds plausible at first, and it agrees with experiment. But there's a troublesome issue. This model requires that a pulse of energy and momentum from the first ball ends up at one localized point, the point where the last two balls touch. How does it do that without dispersion, for the compression pulse initially goes in all directions within the balls, forward, backward, up, down and all directions in between? It is reflected from the ball surfaces (the balls are spherical after all) in very complex paths (and most of these paths are not equal in length from start to finish). Though it sounds good, it fails to convince the skeptical student.
But the model does work remarkably well in predicting where the chain of balls will break first. One seldom discussed confirmation test is this. The model predicts that the initial break point of the ball chain is determined by the length of the compression pulse paths through the chain, and not on the mass of the balls. Therefore if mass were added to one or more of the balls, without changing its diameter, the initial break point should be the same. This can be done with the real apparatus by attaching weight to the bottom of one or more balls. Experiment confirms the prediction.
3. The balls-and-springs model. This model imagines a linear string of balls with small springs between them. It treats the system as a lattice array. It turns out that to make this work as a simulation of the spherical ball Newton's cradle, the springs do not obey Hooke's law, F=-kx, but rather obey the Hertzian spring law, F = -kx3/2. This, it is argued, is a result of the balls being spherical. A linear array of objects of different shape, say cylinders, would behave differently. While interesting, this model is not an exact simulation, for its predictions do not quite match the real behavior.
Testing the models. Any model we might devise ought to be successful for the N-ball case with identical spherical elastic balls. It also ought to be successuful in the case where the balls are of mixed sizes, shapes, and masses. The very fact that new models are proposed every year, in professional journals, is evidence that there's no fully successful model yet, certainly no simple one suitable for elementary physics classes. The bibliography references at the end of this web page is further evidence of that.
Asymmetric Balls.
A particularly interesting variation of this toy is made with several equal balls, but including one ball of larger mass than the others. We'll call this the "oddball cradle". Consider the three-ball version:
- o oo, One ball moving two stationary, equal mass (for comparison)
- o oO, Small ball moving, other two stationary, large one on other end.
- o Oo, Small ball moving, other two stationary, large one in the center.
- o OO, Small ball moving, other two large and stationary.
- O oo, Large ball moving, two small ones stationary.
- O oO, large ball moving, small and large one stationary.
- O Oo, large ball moving, large and small one stationary.
Can you predict the outcomes? Can you predict which ball moves faster, and whether one or more balls remain stationary after impact. Here's an animated GIF of case 2 for the case where one ball has twice the mass of the others. Observe the successive collisions. Calculate the momentums and kinetic energies to confirm this is realistic.
{kind=link}
 |
| Computer simulation of collisions using the successive collisions model. |
|---|
Anders Thorin has supplied this computer animation to show outcomes for various three ball collsions with balls of different mass. He used the successive collisions model, which assumes the balls were not quite in contact initially. Also, the size of the balls is not considered in the successive collisions model. The reader is invited to put all of these cases to experimental test.
Commercial versions sold as scientific apparatus for physics demonstrations often include one ball that is 3 or 4 times the mass of the others (and is of larger diameter). What do you suppose this is intended to demonstrate?
Bibliography.
These are in chronological order, mostly from these journals:American Physics Teacher (APT)
American Journal of Physics (AJP)
The Physics Teacher (TPT)
- Harvey B. Lemon, An Almost Forgotten Case of Elastic Impact, TPT 3, 36 (1935). [Discussion of the 3:1 mass ratio case.]
- Seville Chapman, A problem Involving the Order of Impacts, Proceedings of the AAPT Philadelphia meeting, December 1940, AJP 9, 56 (1941).
- Seville Chapman, Some Interesting Aspects of the Collision Ball Apparatus, AJP 9, 357-360 (1941).
- Harold K. Schilling and Henry Yeagley, A New Impact Apparatus, AJP 15, 60-64 (1947).
- John V. Kline, The Case of the Counting Balls, AJP 28, 102-103 (1960).
- Seville Chapman, Misconception Concerning the Dynamics of the Impact Ball Apparatus, AJP 28, 705-711 (1960).
- R. Edwin Worley, Impact Demonstration with Plastic Croquet Balls, AJP 30, 769-770 (1962).
- James D. Kerwin, Velocity, Momentum, and Energy Transmissions in Chain Collisions, AJP 40, 1152-1157 (1972).
- Leonard Flansburg and Karl Hudnut, Dynamic solutions for linear elastic collisions, AJP 47, 911-914 (Oct 1979).
- Alexander Langsdorf, Jr., Letter: Referees Beware!, AJP 48, 335 (1980).
- Christian Lehmann and Manfred Rosenbauer, Erratum: "Focusing and defocusing collisions of atoms in solids: A classroom demonstration," [AJP 48, 496-497 (1980)], AJP 49, 89 (1981).
- F. Herrmann and P. Schmalzle, Simple explanation of a well-known collision experiment, AJP 49, 761-764 (1981).
- Alexander Langsdorf, Jr., Letter: AJP 50, 105 (1982).
- F. Herrman and M. Seitz, How does the ball-chain work?, AJP 50, 977-981 (1982).
- Jean C. Piquette and Mu-Shiang Wu, Comments on "Simple explanation of a well-known collision experiment," AJP 52, 83 (1984).
- F. Herrmann and P. Schmalzle, Response to "Comments on "Simple explanation of a well-known collision experiment," AJP 52, 84 (1984).
- Matthias Reinsch, Dispersion-free linear chains, AJP 62, 271-278 (1994).
- David Auerbach, Colliding rods: Dynamics and relevance to colliding balls, AJP 62, 522-525 (1994).
- Robert Erlich, Experiments with "Newton's Cradle," TPT 34, 181-183 (March 1996).
- Roura, Pere, Collision duration in the elastic regime," TPT 35, 435-436 (Oct 1997).
- Gavenda, J. D. and J. R. Edington, "Newton's Cradle and Scientific Explanation," TPT, 35, 411-417 (Oct 1997).
- Mascarenhaus, F. M. F., C. M. Spillmann, J. F. Lindner, and D. T. Jacobs, "Hearing the shape of a rod by the sound of its collision," AJP, 66, 692-697 (Aug 1998).
- Roura, Pere, Collisions Between Rods: A Visual Analysis," TPT 41, 32-35 (Jan 2003).
- C. M. Donahue, C. M. Hrenya, A. P. Zelinskaya and K. J. Nakagawa. "Newton's cradle undone: Experiments and collision models for the normal collision of three solid spheres." Physics of Fluids 20, 113301 (17 Nov., 2008), doi. 10.1063/1.3020444.
- Pira Bibliography, linear momentum and collisions.
First version July, 2001. Revised 2002, 2003, 2017, 2020.
![]() Input and suggestions are welcome at
the address to the right. When commenting on a specific document,
please reference it by name or content.
Input and suggestions are welcome at
the address to the right. When commenting on a specific document,
please reference it by name or content.
Return to Donald Simanek's page.