|

Physics 101 For Perpetual Motion Inventors
Here's a quick review of some of the elementary physics principles most often misapplied. This compilation is obviously not complete. Parts of this may be redundant and even repetitious, but repetition often helps impress important points on the mind. This is a checklist/reminder of things you need to know thoroughly before embarking on analysis of any machine or mechanical system. Consult a good elementary physics book for more details, and for examples.
Several readers have told me they used this with success as a review sheet for their final exam in first semester introductory physics.
This document began its life as a review of basic physics for perpetual motion machine inventors, who often misapply elementary physics. For that reason it emphasizes those mechanics principles applicable to machines. However, these are basic to all of physics, and if not properly understood, can adversely affect understanding of everything else in physics.
Mechanics.
All of the principles reviewed here are based on the assumption that the analysis is being done in an inertial (non-accelerating) coordinate system. More advanced physics courses extend or refine these principles using calculus concepts, new formalisms, and more general coordinate systems.Vector quantities are shown in boldface font.
Mathematics of scalars and vectors
- A scalar is a physical quantity whose definition does not in any
way depend on direction in space.
Scalars include time, mass, volume, temperature,
density and others. The size of a scalar quantity is represented as a number.
In physical equations, scalars obey the algebra of numbers.
- A vector is a physical quantity dependent on direction in space.
A vector has both size and direction, and both must be
specified to uniquely characterize the vector.
Vector quantities include displacement, velocity, acceleration, momentum,
angular momentum and others.
Since surface area has spatial orientation,
it is often treated as a vector. Direction matters with vectors.
Two vectors are said to be equal only if their sizes
and directions are the same.
|
- Vectors in physical equations obey an algebra quite different from
that of ordinary scalar algebra. One useful and intuitive pictorial
representation of a vector
is an arrow. The length of the arrow represents the vector's size, and the
direction of the arrow represents the vector's direction in space.
With this representation we may illustrate relations between
vectors geometrically.
- The size (or magnitude) of a vector quantity is a
scalar, i.e., a number.
The size of vector V is symbolized |V|.
(Note that the V is boldface, since it is a vector, but the
lightface "absolute value" brackets, | |,
indicate that the entire quantity is a scalar. I.e., the symbols tell us to take the
absolute value of a vector, which gives a scalar result.) Alternatively
we may simply write the vector's letter symbol lightface to indicate that it represents only the size of the vector.
- The sum of two vectors may be found by geometrically placing the
arrows representing the vectors head-to tail. The sum may then be
found by drawing a new vector from the free tail to the free head.
- The difference between two vectors A - B is found by adding
the vector A and the vector -B where -B
is a vector of the same size as B but opposite in direction.
- The projection of a vector onto a line is
Vcosβ,
where β is the angle between
the vector and the line and V is the size of the vector.
This may be found geometrically by
constructing lines perpendicular to the reference line and from the head and
tail of the vector. The length along the reference line lying between the
construction lines is the "projection of the vector along that line".
|
- Components of vectors. When dealing with vectors algebraically
it's useful to represent a vector by its components. The component of a vector
is the projection of that vector onto a chosen coordinate axis.
The component of a vector is usually treated as a scalar quantity.
While the coordinate axis can be
any line, we customarily use the axes of a Cartesian coordinate system,
specifying the x, y, and z components of the vector.
When this is done, any vector in the space is uniquely defined by specifying
the coordinate axes, and the vector's components along those axes, (x,y,z).
Sometimes it's even useful to have a set of coordinate axes
that are not orthogonal (perpendicular), so long as the axes "span the space". Coordinate axes span the space if we are able to uniquely represent any vector in the space by its components along those axes.
This requirement is met if the three axes do not all
lie in the same plane and no two are collinear.
- The physical effect of a vector quantity (for example, a force) nearly always depends on its line of action, that is, where it acts on a body. But for the process of summing vectors, the vectors may be treated as free vectors, that is, they may be freely moved parallel to their original position, maintaining their size and direction.
|
- Usually vectors' tails don't happen to lie on a coordinate axis. In that case
a vector's components are found by the following procedure.
Drop two perpendiculars to the axis, from the vector's head and
from its tail. Then the vector's component on that axis is the length between the feet of these perpendiculars. The illustration shows vectors lying
in an x,y plane, but the same principle is used for three-dimensional situations.
- The components of vectors are signed scalar numbers (they may
have positive or negative sign). Subtract the tail projection
value from the head projection value to get that signed number.
- If the components of two vectors are
(x1,y1,z1)
and (x2,y2,z2) then the components of the
sum of these vectors is
(x1+x2, y1+y2, z1+z2).
- The product of a vector and a scalar, Vs, is a vector of size
|V|s. It has the same direction as V.
- Two kinds of vector products are useful in physics, and these will
be defined later when we need them.
- In elementary courses there's no definition that allows dividing anything by a vector quantity.
- Vs = sV (Commutative law.)
- (A + B + C)s = As + Bs + Cs (Distributive law.)
Kinematics
Kinematics is the geometry of motion. Kinematics describes motion, without using Newton's laws, and without using the concepts of force and mass.
- Physical quantities of different kinds are distinguished by
unit and dimension labels. These two terms are not synonyms.
See my glossary of physics terms.
Quantities with different dimensions are never added.
Quantities with different units are never added.
Vector and scalar quantities cannot be added together.
The dimensions of length, mass and time are designated L, M, and T.
The units of length, mass and time in the metric system are meters, kilogram and second in the MKS system. They are centimeter, gram and second in the cgs system. They are usually abbreviated, m, kg, s, and cm, g, s.
- Fundamental measurables are those that are not defined by
equations, but are defined by specifying an operation (a measurement procedure) to determine
their size. These are scalar quantities. Length,
mass, and time are the three fundamental measurables of mechanics. In the
study of thermal physics, optics and electricity, additional fundamental
measurables are used.
- Displacement is the vector representing the relative position
of two points in space.
Its size is the distance between the points; its direction
is the direction of the line segment joining the points. When we speak
of displacement of a body during a time interval, the displacement is a vector drawn
from the earlier (initial) position to the later (final) position of that body.
- The velocity of a body is defined as
v =Δx/Δt,
where Δx
is the displacement vector during a very small time interval
Δt. The calculus definition of velocity is v = limΔt→0(Δx/Δt) = dx/dt.
Remember Δx and dx are vectors.
- The acceleration of a body is defined as
a = Δv/Δt,
where Δv
is the change in velocity during a very small time interval
Δt. The calculus definition of acceleration is a = limΔt→0(Δv/Δt) = dv/dt.
Remember, Δv and dv are vectors.
Statics
Statics considers non-moving systems, where the net force on each and every part of the system is zero and the net torque on each and every part of the system is zero. Many of the results of statics can also be applied to systems in which every part moves at the same constant velocity. But systems in which any part rotates do not qualify as static systems, and we cannot apply the laws for static systems to them.
- An inertial reference frame is a coordinate system that is not accelerating.
- A static system is one in which all parts of a system are at
rest relative to an inertial frame of
reference. Statics is the physics of such systems.
Finding the torque due to a force on a body. - Torque expresses the ability of force to cause rotation of
a body about a chosen particular axis of rotation.
While torque is a vector quantity, it may be treated as a signed scalar
when all the forces of concern lie in a common plane, as is the case with
rotating wheels. The figure shows such a body, of arbitrary shape.
We wish to know the effect of force F
to cause rotation about the axis marked
× labeled "Center of torques".
P is the point of application of force on the body.
Extend a "line of action" along the force vector far enough to allow
drawing a line perpendicular to it and passing through the center of
torques. The length of this last line (L) is called the "lever arm" of the
force. The size of the torque about this center of torques is then
FL. If the force is such that it alone would rotate the body clockwise
around the center of torques, then we assign it a negative sign. If it alone
would rotate the body counter-clockwise, we assign it a positive sign.
- The torque concept is useful in both static and dynamic systems, but
in static systems nothing rotates, so the net torque on each part of
the system is zero.
- When the forces on a body do not lie in a single plane,
we must treat torque as a vector. The definition is as above in the
plane that contains the vector and the chosen center of torques.
The vector representing the torque is along a line perpendicular to that
plane and passing through the center of torques. If, as you look at this
plane, the torque would produce clockwise rotation, then the torque vector
is pointing away from you. If the torque would produce counter-clockwise
rotation, the torque vector points toward you. The right hand rule
is a useful mnemonic for getting this right. Curl your fingers around the
line of the torque, with your fingers curling in the direction of the
rotation, then your thumb points in the direction of the torque.
- When a body is at rest, the net force on the body is zero and
the net torque on the body is also zero. Furthermore, the net torque
on the body is zero no matter what center of torques is chosen. That
simply means that the body does not rotate about any axis. It
isn't rotating at all.
- Putting this another way: If the net torque on a body is zero about
an axis, it will also be zero about any other chosen axis,
even an axis that does not even pass through the body.
- The center of mass of an extended body is an imaginary
(but useful) point defined this way. It is the point through which
any plane you draw will split the body into two parts of equal mass.
- The center of gravity of an extended body is that point
through which any plane you draw will split the body into two parts
of equal weight in a gravitational field.
Dynamics
Dynamics deals with Newton's laws and their consequences.
- Mass is an intrinsic property of a body. Gravitational mass is
measured by determining the gravitational force on a body relative to a
mass standard. Inertial mass is determined and defined by Newton's
second law (see below). So far as we know, the gravitational and inertial mass
of a body are the same size.
- An inertial frame of reference (coordinate system) is one that
isn't accelerating. That means the reference frame is either at rest
or moving with constant velocity. More specifically, an inertial frame is a system in which Newton's law F = ma applies, where
F is the sum of all real forces acting
on the body of mass m (see below).
- Dynamics is the study of systems in which some parts of the
system accelerate. Newton's F = ma applies
to each part of such systems.
- Real forces are forces that act on a body due to the influence of some other body.
For our present purposes, we define real forces to be of two
kinds: (a) forces at points where bodies contact, the force being due to elastic deformation at the point or surface of contact,
(b) gravitational, electric, magnetic and nuclear forces that can
act on bodies that aren't in contact (acting "at a distance"). The term "real force"
does not include fictitious forces, which are a mathematical construct
that is useful when doing problems in accelerated coordinate systems. Fictitious forces include centrifugal and Coriolis forces.
- When the net force on a body is zero: (1) A body at
rest will remain at rest. (2) A moving body continues to move with constant
speed in a straight line. This is Newton's first law.
- If F is the net real force on a body and
a is the acceleration of the center of mass of that body.
Then F = ma. (This equation is equivalent to Newton's first and second laws in the special case where the mass doesn't change.)
- Newton's first two laws are embodied in this more general statement:
The rate of change of momentum of a body is proportional to the net force
acting on it. In equation form, F = d(mv)/dt. This is
a vector equation, and applies even in those cases where the mass may
change size.
- Newton's third law: If body A exerts a force on body B,
then B exerts an equal size and oppositely directed force on A. It can be written: FAB = - FBA.
Remember that forces are vectors. The two forces of Newton's third law
act on different bodies.
- When applying Newton's second law, Fnet = ma, the net force on a body is the vector sum
of all real forces acting on that body.
This statement assumes the problem is being done in an inertial frame
of reference. A common error is to include forces acting on other bodies when taking the sum.
- To avoid errors in application of Newton's laws (above) it helps to
mentally "isolate each part of the system" then tally all real forces
acting on that part of the system (and only that part)
before applying Newton's F = ma to that part.
Many forces acting on a part of the system are due to contact with other
parts of the system (or to "action at a distance" forces
such as gravitational attraction). Newton's third
law applies to all of these, but one must be careful not to
include forces acting on other
parts when summing the forces on one part. Newton's laws apply to each part
of the system, any grouping of parts, or the entire system.
- When several parts of a system are grouped together as a single 'system'
for the purpose of applying Newton's second law,
the net force on that system
need not include any of the internal forces within the system,
since they sum to zero according to Newton's third law. Some books
write Newton's second law for a system of mass m
as Fnet, external = ma for
this reason.
- Forces due to friction act in a direction to oppose slipping or sliding motion of
the bodies at their contact surface.
Forces due to friction are tangent to the contact surface where
the bodies touch.
Note: The short phrase "friction opposes motion" should not be
used for it can be misleading, and often just plain wrong.
The force due to friction exerted by the floor on your feet acts in
the direction of your walking motion.
This force due to friction on your feet helps prevent
your feet slipping backward, as they might on ice.
The force due to friction of the pavement acting on your automobile's
wheels is forward, in the plane of the pavement and in the direction of the auto's motion.
Forces due to friction and forces due to rolling resistance
(see next item) are the only forces that
sustain your car's forward motion. Friction can act at
two surfaces either at rest or sliding. Rolling resistance
is quite another matter.
- Rolling resistance results from elastic or non-elastic deformations of
bodies in contact, even if they are not slipping or sliding.
To illustrate the difference
between rolling resistance and friction, consider this example. A ball or
cylinder rolls on an infinite horizontal plane. Will it roll forever? No. Why?
- Not simply because of friction. Forces due to friction are, by definition, forces acting tangent to the contact surface. Forces due to friction act parallel to the plane in this situation.
- If such a tangential force acted opposite to the motion of the ball, this alone would be expected to decrease the ball's forward velocity, but it would have a torque that would be in a direction to increase the angular velocity of the ball. This is contradictory.
- If a tangential force were in a direction to decrease the angular velocity it would have a torque that would increase the forward linear velocity. Likewise contradictory.
- Both forces due to friction and rolling resistance are usually present
where two bodies are in contact. We sometimes
carelessly combine their effects and call it "friction". Sometimes we can
get by with that without introducing errors, but we should be more careful.
See next item.
- Two bodies that are in frictionless contact and do not deform at the
points of contact exert forces on each
other that are normal (perpendicular) to the surfaces at the point of contact.
This also applies to frictionless rollers and ball bearings.
But this is an idealized case, for all material bodies deform somewhat.
Because of elastic deformation,
there can be tangential force components of rolling resistance
even in the frictionless case. See next item.
- All materials deform somewhat under load. Perfectly rigid bodies are
impossible in nature, for if they collided, reaction forces at the point of
contact would be infinite in size and of infinitesimal duration.
- When the net torque on a body is zero: (1) A body that is not rotating
will continue without rotation. (2) A body that is rotating will continue
rotating with constant angular speed. Of course this is idealized, assuming
zero torque due to friction and rolling resistance.
- If the net (total) force on a body has zero component in one direction,
the body will not move in that direction.
- If the vector sum of all forces and the sum of all torques acting
on a body is zero then that body is not accelerating.
- The work done by a force acting on a body is the product of the
force's component in the direction of motion
multiplied by the distance the body moves in that direction.
If a force acts perpendicular to the direction
of motion, that force does no work on the body.
If a force acts on a body, and
there's no motion of the body in the direction of the force, that force does no work.
Work is a scalar quantity.
No work is done by or on a body that does not move.
- A closed system is one in on which no outside forces act.
Since no system is perfectly closed we relax this a bit. If none of
the external forces acting on the system affect it significantly,
we may treat it as closed. If we can determine (measure or predict)
the effect of an
external force on the system we can separate that effect from the
others we are interested in and "correct" for it.
- It follows that a closed system does not take in or eject any mass. It has no input of
energy, no input work and does not do any net work on anything external to it.
Also, its net momentum and angular momentum remain constant. It is very difficult to prevent a machine from outputting energy in the form of thermal energy (colloquially called "heat"), so if it does emit thermal energy, it is not fully "closed".
- Usually when we use the term "component of a vector" we are talking
about a scalar, the projection of the vector onto a line. But sometimes
it's useful to speak of "vector components of a vector". The vector components
of a vector V are any set of vectors that sum to that
vector V. The vector components of a vector
V acting together are physically equivalent to the
single vector V. In motion problems with complicated
paths, it's useful to speak of a vector's radial and tangential components.
- The momentum of a body is the product of its mass and velocity,
and is therefore a vector quantity. P = mv.
- Conservation of momentum.
The net momentum of the parts of a closed system remains constant over time,
no matter what's going on within the system.
This follows from Newton's third law.
- The centripetal force acting
on a rotating body is simply the radial component of the net force acting
on that body. The radial component of a force is the vector component in the
direction of a line drawn from the body to the center of rotation.
The centripetal force
is not a "new" force to be added to the real forces when finding the net force.
Nor is it a fictitious force. It is a real vector component of real forces.
We are here assuming the analysis is being carried out in an inertial coordinate
system. In advanced courses one sometimes does such problems in a rotating
coordinate system. Such systems are non-inertial, so Newton's second law for
real forces does not apply. However, if one introduces "fictitious" forces such
as the centrifugal force, Coriolis force, etc. into the sum of forces, one
can use F = ma, with F including the
real and fictitious forces. This neat trick is
not recommended for beginners.
Some useful mathematics.
- The scalar product (sometimes called the "dot" product) of two vectors is defined by A•B = |A||B| cosθ where θ is the angle between A and B. As its name indicates, the scalar product is a scalar quantity. The dot product appears in the definition of work, W = F•x. Callculus: W = ∫F•dx
- (A + B + C)•V = A•V + B•V + C•V (Distributive law.)
The geometry of the cross product.
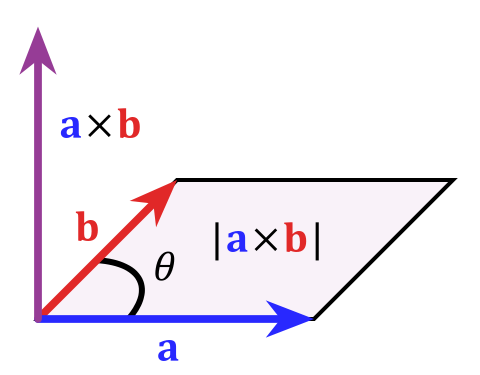
- The cross product of two vectors a and b is defined by |a×b| = |a||b| sinθ where θ is the angle between a and b. This gives the size of the cross product. The cross product is a vector quantity. Its direction is perpendicular to the plane of a and b in a direction given by the right hand rule: Curl the fingers of the right hand from a to b, then the cross product is in the direction your thumb points. The cross product appears in the definition of torque, τ = R×F.
In the diagram, a and b lie in a plane (of course), and a×b is a vector perpendicular to that plane. The size of the cross product, |a×b|, is the same as the size of the area of the shaded trpezoid in the plane of a and b.
- A×B = - B×A (Anti-commutative law!)
- (A + B + C)×V = A×V + B×V + C×V (Distributive law.) The ordering of factors is important, for the cross product is anti-commutative.
- Infinity is not a number, and should not appear as if it were a number in any valid physical equations. Never write ∞×0, for example. It is ok to label limiting processes in the form x→∞, but special care must be taken to interpret that properly.
Gravity, energy.
- Newton's law of gravitation. Two spherical bodies of masses
m1 and m2 whose centers are
a distance R apart exert forces of attraction on each other of size
F = Gm1m2 / R2. G
is the universal gravitational constant.
- Gravitational potential energy is a convenient concept when dealing
with bodies or systems in a gravitational field. It allows one to treat the body
as "possessing" energy due to its position in the field, thereby avoiding the
need for including the gravitational source as part of the system.
The gravitational potential energy of a body at a certain position is just the
work that must be done on the body to move it to that position from some
fixed reference position. Gravitational potential is the potential energy of a body
divided by the mass of the body.
- The work done in moving a body from point A to B in a gravitational field
is independent of the path along which it moves between A and B.
The potential energy difference between those points is independent of the path.
It follows that the potential energy change around any closed loop path is zero.
These characterize the field as energy conservative.
- Forms of Energy. Energy can be present in many forms:
kinetic, thermal, electrical, nuclear, various kinds of potential energy and others.
But there are only two classes these fall into: kinetic and potential.
Kinetic energy is due to motion of mass. Potential energy is due to the
geometric arrangements of masses relative to the forces they exert upon each other.
- Conservation of Energy. When all
forms of energy are accounted for and measured,
the total energy of a closed system remains constant over time.
- Conservation of Linear Momentum. There is one form of linear momentum, mv. The vector sum of all linear momenta in a system is a conserved quantity.
- Conservation of Angular Momentum. There is one form of linear momentum, mr×v, where r is the vector distance of the mass m from a fixed point. The symbol "×" represents the vector cross product of the vector quantities it stands between. The vector sum of all angular momenta in a system is a conserved quantity.
Liquids, hydrostatics.
In the following principles we use the phrase "connectable points" to mean two points in the liquid that can be connected by an unbroken line drawn between them that passes only through the liquid.These principles apply only to static or quasi-static systems, where the system has achieved static equilibrium. Some of these principles (those that mention "level" or "height") implicitly assume an experiment done on earth, or in a gravitational field where these words have specific meaning with respect to the direction of the field.
- Solids undisturbed preserve their shape. Liquids flow to an equilibrium condition that conforms to the
shape of their container. Solids have rigidity and elasticity, but can
be deformed by compression, stretching and shear. Most liquids
strongly resist being compressed, and to a first approximation may be
considered to maintain constant volume over a wide range of pressures.
- Liquids "seek their own level". This means that when they reach equilibrium their boundary is their container and their upper surface. Their upper surface is level. More precisely, any two connectable points on the air/liquid surface of a liquid at rest are at the same height.
- Liquid pressure is a scalar quantity. Liquid contacting a solid surface
is responsible for a force on that surface. The force is perpendicular to the
surface and of size F = PA where P
is the liquid pressure and A is the area of
the surface. The area must be small enough that the pressure is essentially
constant over the surface. This is, in fact, the definition of pressure,
which is, in calculus form, P = dF/dA.
- Pressure at a given point in a liquid exerts force on an infinitesimal
area at that point, which is the same size no matter what the orientation
of that area. This is often abbreviated in a potentially misleading slogan
"Pressure acts equally in all directions." And "all directions" includes upwards.
A continuous line may be drawn through the liquid,
connecting points A and B. Therefore the pressure
difference between these points is ρgH,
where ρ is the liquid density. - Any two connectable points in a liquid are at the same pressure
if they are at the same height.
- The pressure difference between two connectable points in a liquid is
ρ gH.
ρ is the liquid density,
g is the acceleration due to gravity
and H is the height difference between the two points.
- Pascal's principle. If the pressure changes at one point in a
liquid, it changes by the same amount at all other points
connectable to that point. The change is from one quasi-static situation to a different quasi-static situation.
- Archimedes' principle. If a body is floating on or immersed in
a liquid, the liquid exerts a net upward "buoyant" force due to the
pressure differences on the body's surfaces. Horizontal forces due to pressure
add to zero, but vertical components don't because of height differences.
Using the principles above, one can derive a simple result: The buoyant
force on the object is equal to the weight of the liquid the object has
displaced. Warning: There must be liquid underneath the body for there to
be an upward buoyant force on it. The buoyant force is due to pressure
differences; it isn't the result of any mythical "desire" of the water displaced
(pushed aside) to return to its original place.
Mistakes often made.
My correspondence indicates that many people have fixed in their minds a collection of notions about how nature works what are partly or entirely wrong. These are difficult to unlearn. Here's the source of some of these.
- Failure to distinguish and properly define important quantities that also have
colloquial meanings: force, torque, energy, and momentum. Often people think these are
all the same thing, and interchangeable. They are not.
- When we speak of the "efficiency" of a machine or system, it is energy efficiency we mean. It is defined as the ratio of the machine's useful work output to the required energy input to sustain the machine's operation over a period of time. It is not a ratio of force, torque, velocity or momentum.
- Energy efficiencies greater than one are not possible. Energy efficiencies of exactly one would be possible if all dissipative processes (friction, rolling resistance, material deformations, etc.) could be eliminated. But such a device would not be capable of outputting any useful work. Natural processes all have dissipative behavior, indeed, without dissipative processes the machinery of our civilization would be non-functional. For example, without friction you could not walk, automobiles would not move, etc.
- Often mistakes of analysis are made by neglecting to properly isolate a system or subsystem when using Newton's laws. Another mistake is to include forces acting on some other part of the system. In short, be very clear what each force acts upon.
- Don't forget Newton's third law in your analysis.
- All forces acting on a system must be accounted for in applying Newton's laws to that system. Do not neglect friction, rolling resistance, and reaction forces due to deformation of structural elements.
- There's widespread misunderstanding of centripetal force. It is not a new or mysterious force, but merely a label name for the radial component of real forces. And centrifugal force is a fictitious force useful when analyzing a system in a rotating coordinate system. It is entirely irrelevant when using a non-rotating system, and you should always know exactly what sort of system you are using before doing the analysis. And never change coordinate systems or mix them during the analysis.
Important physics facts often overlooked.
- All material bodies are at least somewhat deformable. Forces are always
associated with these deformations.
- No physical influence can propagate through space between two different
points instantaneously.
(Nothing can be in different places at the same time.)
- Infinite forces are not allowed. In fact, infinite values are not allowed for any physical quantity.
- Information cannot travel instaneously between two displaced points.
- Gravitational fields are additive. Gravity shields cannot exist.
- Over-unity energy efficiencies are impossible.
If I have misrepresented standard classical physics in any of the above, I would appreciate being informed of it so I can correct it.
Latest revision April 2014.
Return to front page.
Return to the top of this document.
Return to The Museum's Main Gallery.